【雷赛智能 |
您所在的位置:网站首页 › 编码器芯片 3af95k › 【雷赛智能 |
【雷赛智能
|
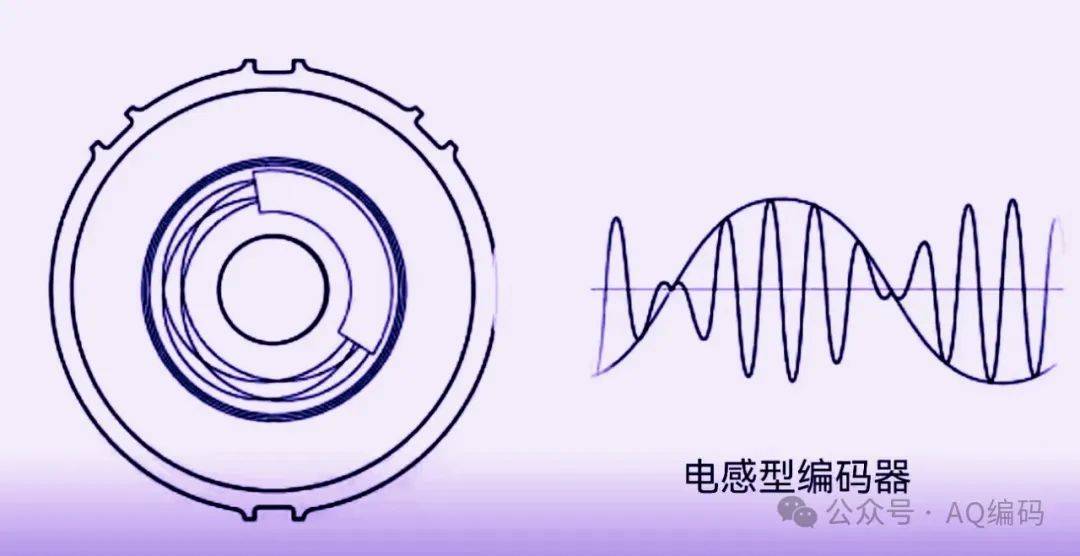
德国海德汉的电感双编码器,图片来自海德汉公众号,致谢! 电感编码器原理
电感是电流闭合回路的一种属性,是一个物理量L。当线圈通过电流后,在线圈中形成磁场感应,处于感应磁场中的导体,例如金属体中又会产生感应电流,来抵制通过线圈中的电流。这种电流与线圈的相互作用关系,称为电的感抗,也就是电感L。 电感计算公式:L=μ×Ae*N^2/ l 其中:L表示电感量、μ表示磁心的磁导率、Ae表示磁心的截面积、N表示线圈源的匝数、l表示磁心的磁路长度。 假如处于感应磁场中的导体是一个平面金属体,并垂直于线圈方向,金属体感应电流就像一个漩涡,称为感应电涡流。感应电涡流又会再产生一个被动感应磁场。 电感传感器就是去感知后面发生的这个被动产生的感应磁场。电感接近开关,电感距离传感器,电感面积传感器等等。 电感编码器的设计原理是感应面积的变化对应计算角度。在电感编码器的转动部分即转子上,可以设计有图形的电极板,在角度旋转变化中,电涡流变化而被感应,计算感应到的信息及与电极图形比较,以此推算出编码器旋转的角度值。
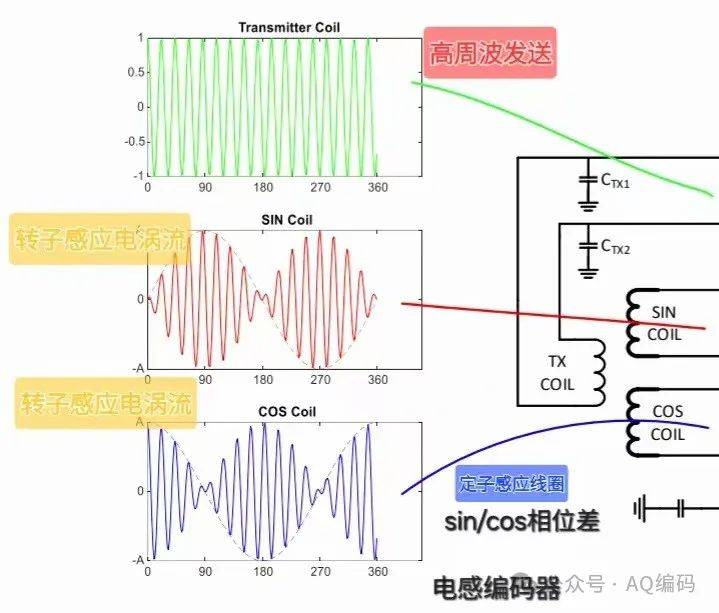
其中,在编码器定子电路板上设计有一个发送固定高周波信号(大于100KHz),产生一个交变的磁场,在磁场下方有电极板(转子)就会产生电涡流。
转子电极板上的电涡流继续产生一个被动的磁场,再一次被定子电路板上的两个线圈感应到信号大小的变化。
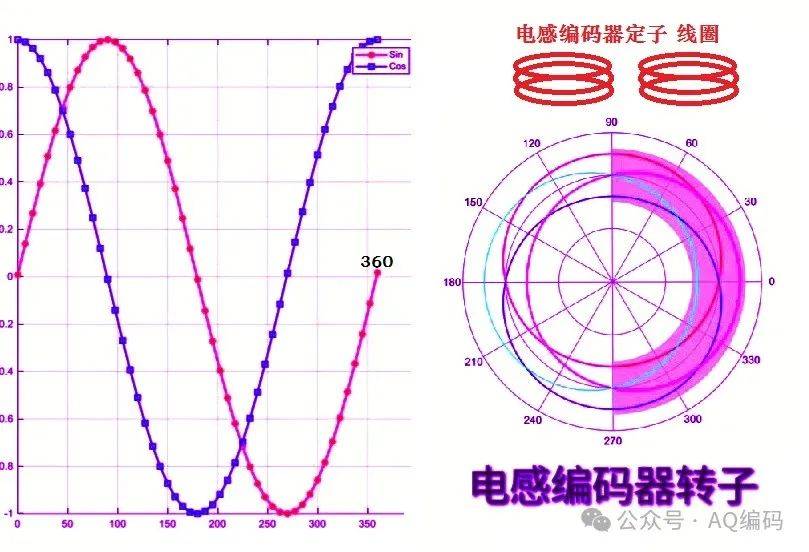
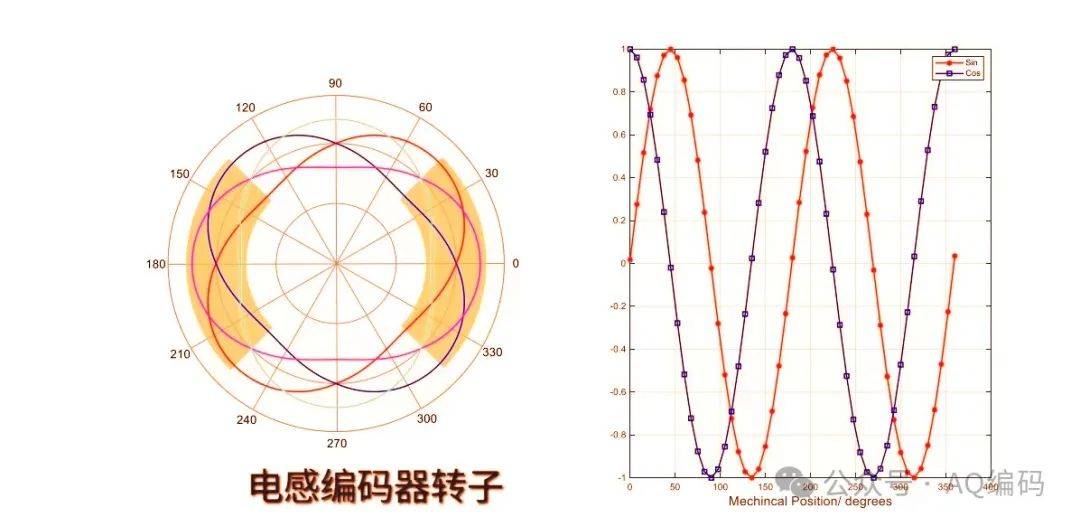
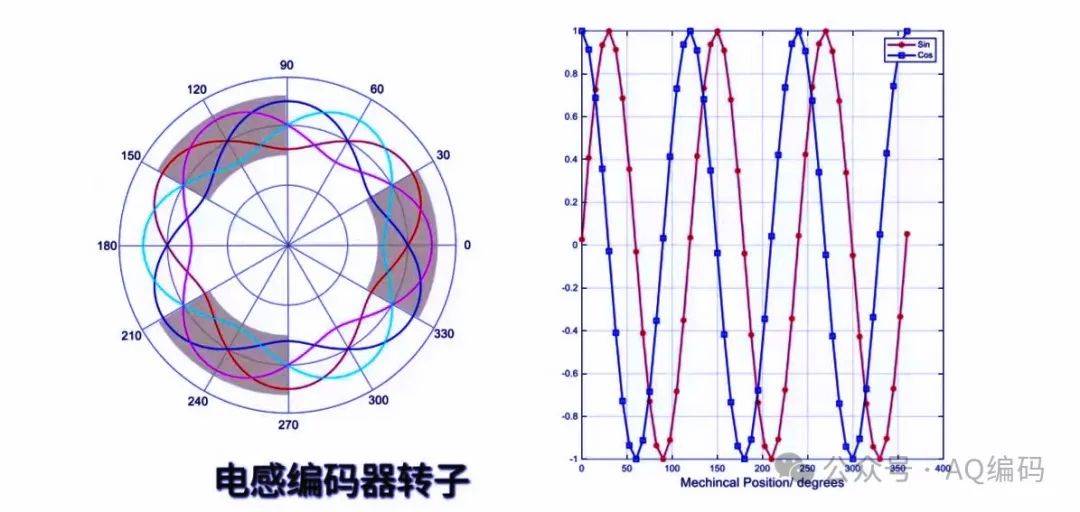
这样的信号变化被设计为一定的SIN/COS规律,计算相位差得到转子角度值。 电感编码器转子上的电极图案是可以多样设计的,不同的图案得到不同的周期性变化规律
转子感应电涡流有几组,图中分布只是示意图,实际分布图是一个编码设计图形。 德国海德汉公司的电感编码器—取自海德汉公众号图片。
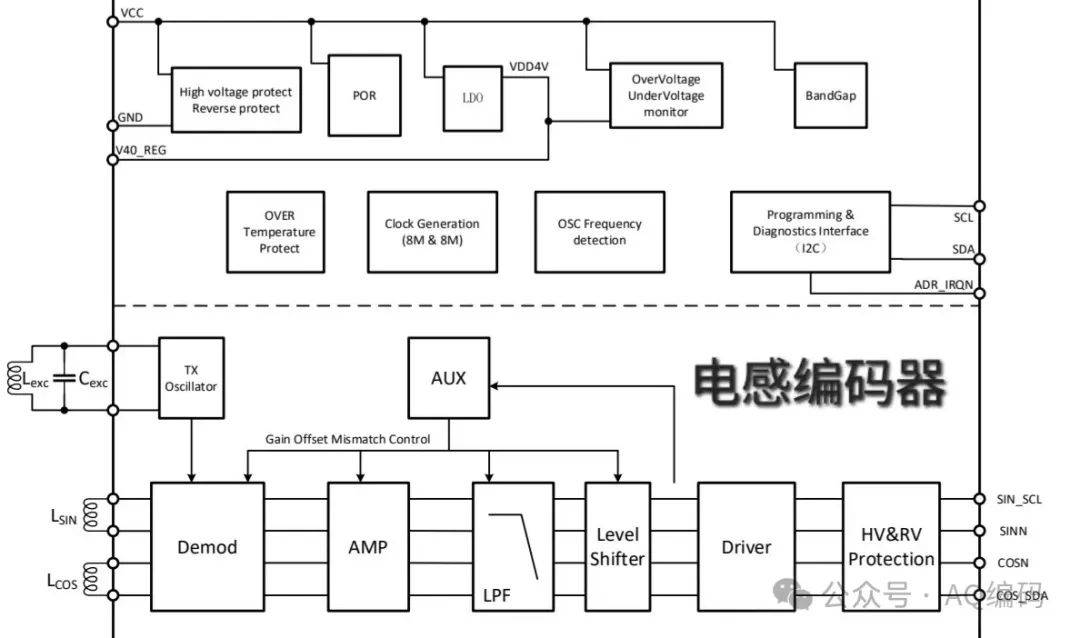
电感编码器感应的被动磁场电涡流信号是很微弱的,需要信号放大电路的矫正放大,并换算出角度值,这将由一颗专用设计的电感编码器芯片完成,此又类似于磁编芯片了。
芯片技术ADC模拟信号处理技术,算法与响应精度,时间抖动克服,等等,似乎我们又回到了磁编芯片走过的过程。 电感编码器的精度和可靠性的揣测 我要坦诚而言,我对电感编码器还没有过实践经验,仅从其电感编码器的原理分析,去揣测推算它的精度与可靠性难点。真实情况还需要有实践者的答案,实践是检验真理的唯一标准。 从电感编码器的工作原理看,从初级线圈发出感应的磁场——转子金属电极电涡流——被动磁场发生并再次感应——定子次级线圈的小信号放大,这四个过程不仅仅是有晶振的时钟精度,还有四次的模拟量信号精度的模拟电路技术。 其中,还有机械安装精度,机械旋转精度。 还有,转子并不是静止的,是在运动中的或者有抖动的,就有电涡流在其运动方向上的分量的误差。 所以,电感编码器不仅仅是初级线圈发送信号的精度,转子电极板加工精度,还有多次的模拟电路信号技术。一讲到模拟信号技术,我要告诉大家,模拟信号的高精度技术远远比数字电路技术复杂与高难度的,需要高精度实验室仪器,这是我们的短板。 主动发送线圈,处于磁场中感应的金属体,被动感知线圈,这三个部分还有一个机械安装与运动精度。在高速旋转中的旋转方向带给转子的电涡流的方向性分量误差。 然后还要取决于这颗专用电感器编码器芯片的模拟信号处理技术。 总之,电感编码器的每一道工艺,都需要有很好的科学仪器的测量与工艺过程控制,才能有较好的精度保证。并且基础的材料学和长期的科学实验室经验积累。 电感编码器的可靠性分析: 电感编码器的特征是线圈高周波发生器和电涡流感应,模拟量小信号放大整理技术,这似乎对于设计的EMI有比较高的要求,对于电路设计宽容度以避免电气损坏有较高的要求。个人感觉可能对于同为高周波的电气干扰是可靠性的死穴,设计中应有屏蔽,避免自激损坏。 前面我们设想是电感编码器可能会大量用于人形机器人上。我最近看到了海德汉用于机器人电感编码器,推出了双编码器的概念:
“海德汉KCI 120 Dplus双编码器一体双能,提供电机反馈和位置测量功能。为实现这两个功能,此编码器采用一个读数头和两个独立的感应式扫描码盘。在齿轮箱的后方测量轴位置,补偿多关节、高动态性能机器人无法避免的误差。”——海德汉文字介绍 为什么需要双编码器?那么还有视觉传感器能否取代电感双编码器? 思考,人形机器人究竟是干什么用的? 科技向善是为人类的进步的。所谓人形机器人,就是有双脚双手的像人一样的做动作,因为那些为我们日常生活的各种环境设计,都是对人的运动性设计的,所以我认为人形机器人的目标市场并不是在车间生产线上,也不是手术机器人,也不是家庭中学习娱乐功能,那些并不需要有人形那样的双脚与双手这么复杂的设计,就可以完成预设任务。那么,人形机器人就是要进入到人的家庭的日常生活,去帮助人干活去的。 也就是说,机械运动是要像人一样的,利用原来为人设计的那些环境和完成任务。因此,人形机器人的机械运动的精度与可靠性是人形机器人最重要的参数, 51个关节,不可靠性的概率就是级数增加的,人形机器人每一个动作都需要由多个关节执行器的配合完成,假如没有精度,就要像老太太穿针引线般的没有了工作效率。 人形机器人每一个动作都要有多个关节执行器的配合,就需要有独立于电机的感知坐标系并相互间通讯同步,这就是运动轨迹外部的坐标系。电机上的第一编码器是运动轨迹,机械末端的第二编码器就是独立于电机的坐标系,观察多个电机的运动轨迹,怎么可能只用自己的电机自己看自己,而没有外部的参考坐标呢?第二编码器的真正作用,是多个执行器感知的可靠性,多个执行器信号联通同步的可靠性。 不仅仅是需要双编码器,人形机器人还需要对目标任务的视觉感知、自学习记忆的比较,并对动作修正补偿。 优质传感器的大量使用,并且要有精度与可靠性的保证,才会有人形机器人可能的发展,并能否真正落地进入到家庭中大量推广的保证。真需求还是伪需求,在于是否能真心科技向善的是为了人。做好产品可靠性就是这个“善”。 产品的精度与可靠性,需要有基础材料学、高精度科学仪器及长期的实践时间积累,还有一颗专用的电感编码器芯片技术。电感编码器是否能够胜任,我还没有答案,答案或许在上面找并思考中,或许会争论很久。返回搜狐,查看更多 |



【本文地址】
今日新闻 |
推荐新闻 |